Da nicht alle Ereignisse am Eingang erfasst werden, speziell bei größeren Geschwindigkeiten des Zuges, muss eine Zwischenplatine dafür Sorge tragen, damit keine Geisterzüge im Betrieb entstehen. Die Grundlage dazu kommt es dem Rocrailwiki und basiert auf dem GCA173 board.
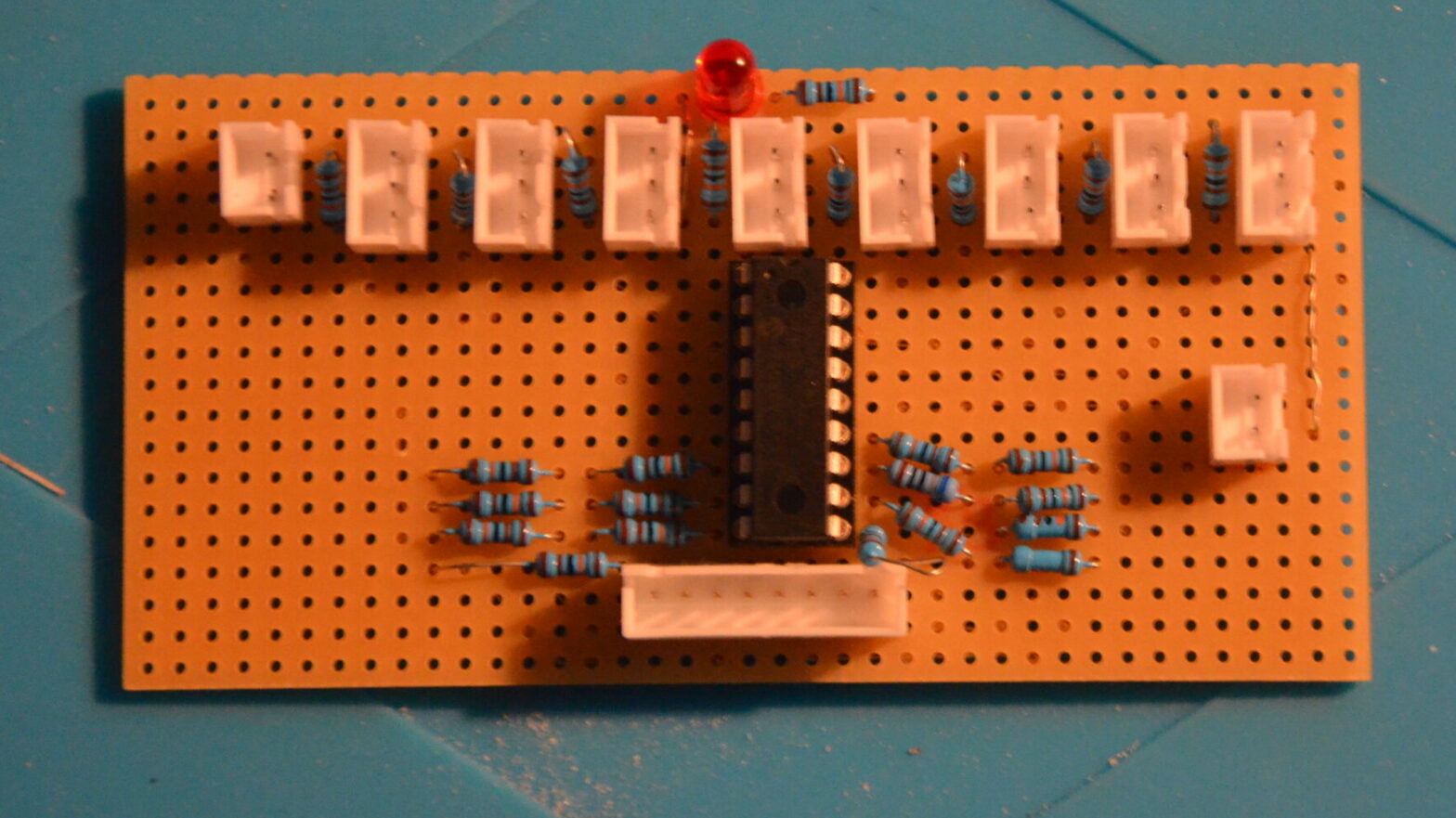
Nach einigen Versuchen am Steckbrett (breadboard) konnte die Zwischenplatine mal grob durchgespielt werden und anschließend skizziert werden. Diese Grobplanung wurde dann gleich mal in KiCad übertragen und danach an einer Lochrasterplatine zusammengelötet. Dieses Alphaboard ist unten abgebildet.
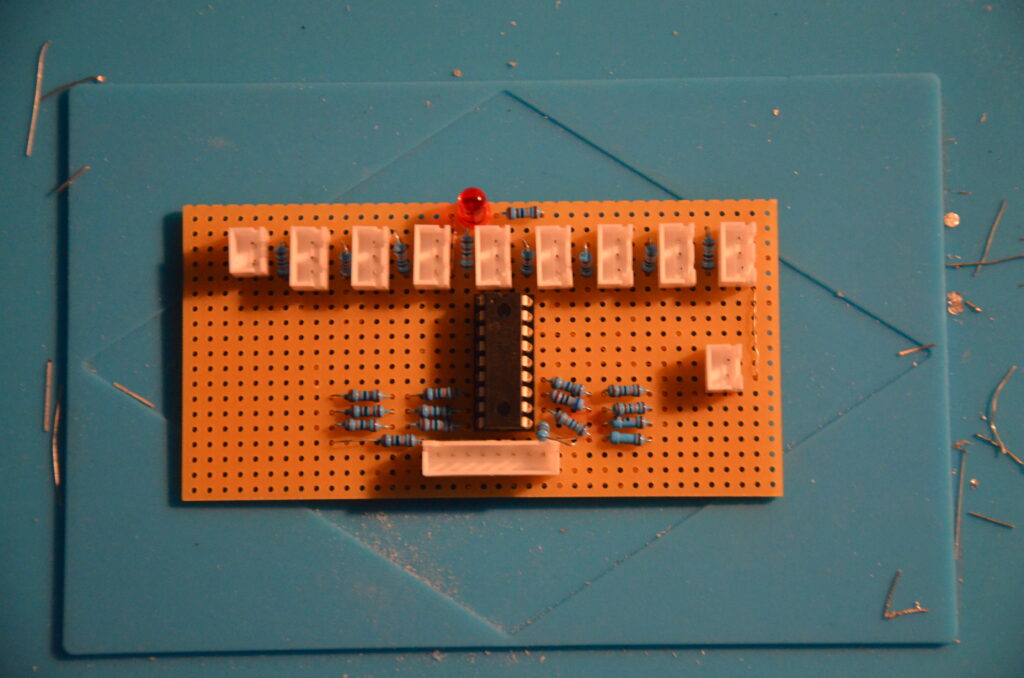
Damit die Platine funktioniert muss diese mit 5V betrieben werden. Um zukünftig die Stromversorgung sicherzustellen, wird an der finalen Platine eine LED als Indikator dienen. Daneben gibt es eine LED die bei Hall-Sensor #4 aufleuchtet, sobald ein Magnet mit korrekter Polung in die Nähe kommt. Dies dient in erster Linie zum Testen der Hall Sensoren. Funktioniert der Aufbau korrekt, wird das Signal sowieso an den PC übertragen.
Da die Platine mit 5V arbeitet und die Steuerzentral an die 3V3 Logik des Raspberry Pis angehängt wird, muss die Signalspannung über einen Spannungsteiler abgesenkt werden. In meinem Fall ist das High-Signal 2.5V. Low-Signal ist bei 0V.
Der letzte Teil war etwas kniffliger. Die Software auf den PIC-Microcontroller zu übertragen. Dafür habe ich mir einen PIC-Programmer organisiert, siehe dazu das nachfolgende Bild.
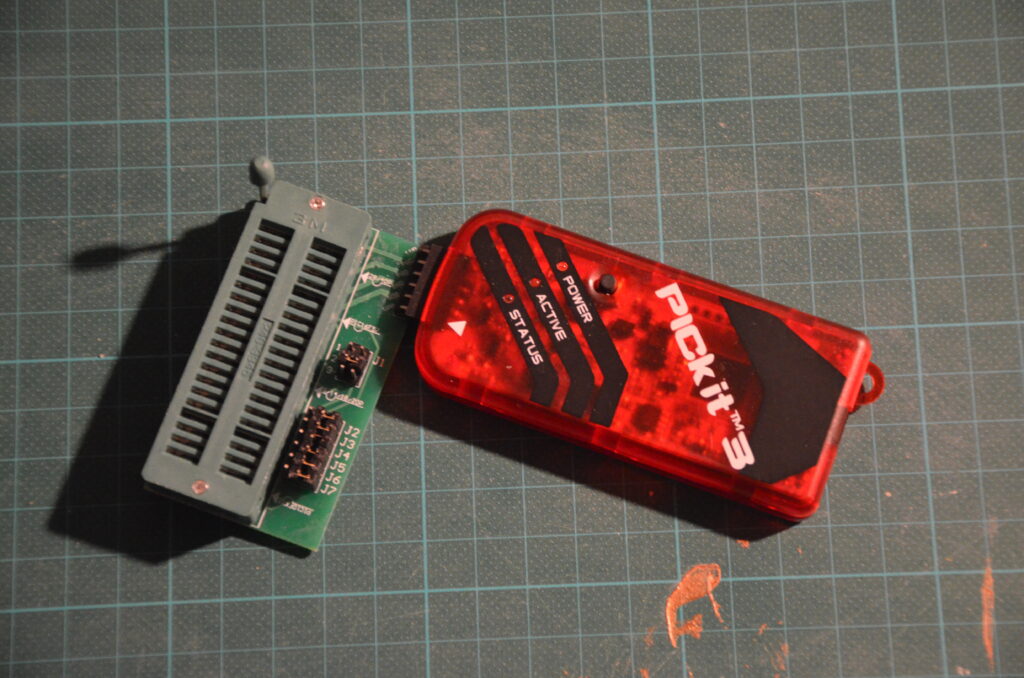
Im ersten Anlauf habe ich dazu die Software 1:1 aus dem Rocrailwiki geflasht. Allerdings war das gar nicht so einfach umzusetzen, da die 5V Spannung über den USB-Anschluss nicht ausreichte. Nach einigem Suchen in Foren habe ich den Hinweis gefunden, die Programmierspannung abzusenken. Da in meinem Fall eine Spannung von 4.6V am PIC16F628A ankam, reichte es aus, die Spannung mit 4.75V anzugeben und innerhalb der Toleranz zu sein.
Nachdem auch diese Hürde genommen wurde, stand einem ersten Test mit 4 Sensoren nichts mehr im Weg. Hier wunderte ich mich zunächst warum nur jeder zweite Ausgang ein Signal liefert obwohl ich die ersten 4 Eingänge belegt hatte. Konnte ich glücklicherweise in der Software nachvollziehen und werde ich dann für die finale Version der Platine dementsprechend anpassen.
Der Testlauf mit verschiedenen Geschwindigkeiten zeigte alle Überfahrten über die 4 Hallsensoren korrekt an. Ein Video dazu reiche ich im nächsten Beitrag nach, sobald die neue Kamera an der Zugmachine montiert und verkabelt ist. In der Zwischenzeit finalisiere ich die Platine in KiCAD und werde diese fertigen lassen.